SISTEMAS OPERATIVOS
Índice
SISTEMAS OPERATIVOS
INTROSPECCIÓN A LOS SISTEMAS OPERATIVOS
1.1 UNIDAD 1: DEFINICIÓN Y CONCEPTO SISTEMAS OPERATIVOS
Definición;

El sistema operativo es, un programa del computador. Como otros programas de computador, da instrucciones al procesador. La diferencia clave está en el propósito del programa. El sistema operativo dirige al procesador en el empleo de otros recursos del sistema y en el control del tiempo de ejecución de otros programas. Pero para que el procesador pueda hacer estas cosas, debe cesar la ejecución del programa del sistema operativo y ejecutar otros programas. Así pues, el sistema operativo cede el control al procesador para hacer algún trabajo "útil" y luego lo retoma durante el tiempo suficiente para preparar el procesador para llevar a cabo la siguiente parte del trabajo. Una parte del sistema operativo está en la memoria principal. En esta parte está el núcleo (kernel), que incluye las funciones utilizadas con más frecuencia en el sistema operativo y, en un momento dado, puede incluir otras partes del sistema operativo que estén en uso. El resto de la memoria principal contiene datos y otros programas de usuario.
Concepto:
Un Sistema Operativo es una parte importante de cualquier sistema de computación. Un sistema de computación puede dividirse en cuatro componentes: el hardware, el Sistema Operativo, los programas de aplicación y los usuarios. El hardware (Unidad Central de Procesamiento (UCP), memoria y dispositivos de entrada/salida (E/S)) proporciona los recursos de computación básicos. Los programas de aplicación (compiladores, sistemas de bases de datos, juegos de video y programas para negocios) definen la forma en que estos recursos se emplean para resolver los problemas de computación de los usuarios.
Recursos administrados por el Sistema Operativo
Existen diversas definiciones de lo que es un Sistema Operativo, pero no hay una definición exacta, es decir una que sea estándar; a continuación se presentan algunas:
 1.- Se pueden imaginar un Sistema Operativo como los programas, instalados en el software o firmware, que hacen utilizable el hardware. El hardware proporciona la "capacidad bruta de cómputo "; los sistemas operativos ponen dicha capacidad de a.C. al alcance de los usuarios y administran cuidadosamente el hardware para lograr un buen rendimiento.
1.- Se pueden imaginar un Sistema Operativo como los programas, instalados en el software o firmware, que hacen utilizable el hardware. El hardware proporciona la "capacidad bruta de cómputo "; los sistemas operativos ponen dicha capacidad de a.C. al alcance de los usuarios y administran cuidadosamente el hardware para lograr un buen rendimiento.
2.- Los Sistemas Operativos son ante todo administradores de recursos; el principal recurso que administran es el hardware del computador; además de los procesadores, los medios de almacenamiento, los dispositivos de entrada/salida, los dispositivos de comunicación y los datos.
3.- Un Sistema Operativo es un programa que actúa como intermediario entre el usuario y el hardware del computador y su propósito es proporcionar el entorno en el cual el usuario pueda ejecutar programas. Entonces, el objetivo principal de un Sistema Operativo es, lograr que el sistema de computación se use de manera cómoda, y el objetivo secundario es que el hardware del computador se emplee de manera eficiente.
4.- Un Sistema Operativo es un conjunto de programas que controla la ejecución de programas de aplicación y actúa como una interfaz entre el usuario y el hardware de una computadora, esto es, un Sistema Operativo explota y administra los recursos de hardware de la computadora con el objeto de proporcionar un conjunto de servicios a los usuarios del sistema.
En resumen, se podría decir que los Sistemas Operativos son un conjunto de programas que crean la interfaz del hardware con el usuario, y que tiene dos funciones primordiales, que son:
Gestionar el hardware.- Se refiere al hecho de administrar de una forma más eficiente los recursos de la máquina.
Facilitar el trabajo al usuario.- Permite una comunicación con los dispositivos de la máquina.
El Sistema Operativo se encuentra almacenado en la memoria secundaria. Primero se carga y ejecuta un pedazo de código que se encuentra en el procesador, el cual carga el BIOS, y este a su vez carga el Sistema Operativo que carga todos los programas de aplicación y software variado.

1.2 funciones y características sistemas operativos
 • Comodidad: Un sistema operativo hace que un computador sea más cómoda de utilizar.
• Comodidad: Un sistema operativo hace que un computador sea más cómoda de utilizar.
• Eficiencia: Un sistema operativo permite que los recursos de un sistema informático se aprovechen de una manera más eficiente.
• Capacidad de evolución: Un sistema operativo debe construirse de modo que permita el desarrollo efectivo, la verificación y la introducción de nuevas funciones en el sistema y, a la vez, no interferir en los servicios que brinda.
El sistema operativo está ahí para administrar todos los componentes de un sistema complejo. Las computadoras modernas constan de procesadores, memorias, temporizadores, discos, ratones, interfaces con redes, impresoras láser y una gran variedad de otros dispositivos. En la visión alternativa, la misión del sistema operativo es asegurar un reparto ordenado y controlado de los procesadores, memorias y dispositivos de E/S entre los diferentes programas que compiten por ellos.
Imagine lo que sucedería si tres programas que se ejecutan en alguna computadora trataran de imprimir sus salidas simultáneamente en la misma impresora. Las primeras líneas del listado podrían ser del programa 1, las siguientes del programa 2, luego algunas del programa 3, y así sucesivamente. El resultado sería un caos. El sistema operativo puede poner orden en el caos potencial almacenando temporalmente en el disco todas las salidas destinadas para la impresora. Cuan- do un programa haya terminado, el sistema operativo podrá copiar su salida del archivo de disco donde se almacenó a la impresora, mientras que el otro programa puede continuar generando salidas, ajeno al hecho de que dichas salidas no están yendo directamente a la impresora (todavía). Cuando una computadora (o red) tiene múltiples usuarios, la necesidad de administrar y proteger la memoria, los dispositivos de E/S y demás recursos es aún mayor, ya que de otra manera los usuarios podrían interferirse. Además, es frecuente que los usuarios tengan que compartir no sólo hardware, sino también información (archivos, bases de datos, etc.). En pocas palabras, esta es visión del sistema operativo sostiene que su tarea primordial es seguir la pista de quién está usan-do cuál recurso, atender solicitudes de recursos, contabilizar la utilización y mediar entre solicitudes en conflicto provenientes de diferentes programas y usuarios.

1.3 evolución histórica sistemas operativos
Los sistemas operativos han estado evolucionando durante muchos años. En las siguientes secciones examinaremos brevemente este desarrollo. Dado que, históricamente, los sistemas operativos han estado de manera muy estrecha vinculados con la arquitectura de las computadoras en las que se ejecutan. La primera computadora digital verdadera fue diseñada por el matemático inglés Charles Babbage (1792-1871).

La primera generación (1945-55): Tubos de vacío
Y tableros de conmutación
La forma de operación usual consistía en que el programador se anotaba para recibir un bloque de tiempo en la hoja de reservaciones colgada en la pared, luego bajaba al cuarto de la máquina, insertaba su tablero de conmutación en la computadora, y pasaba las siguientes horas con la esperanza de que ninguno de los cerca de 20000 tubos de vacío se quemara durante la sesión. Prácticamente todos los problemas eran cálculos numéricos directos, como la producción de tablas de senos y cosenos. A principios de la década de 1950, la rutina había mejorado un poco con la introducción de las tarjetas perforadas. Ahora era posible escribir programas en tarjetas e introducirlas para ser leídas, en lugar de usar tableros de conmutación; por lo demás, el procedimiento era el mismo.
La segunda generación (1955-65): Transistores y sistemas por lote
La introducción del transistor a mediados de la década de 1950 alteró el panorama radicalmente. Las computadoras se hicieron lo bastante confiables como para poderse fabricar y vender a clientes comerciales con la expectativa de que seguirían funcionando el tiempo suficiente para realizar algo de trabajo útil. Las computadoras grandes de la segunda generación se usaban primordialmente para cálculos científicos y de ingeniería, como la resolución de ecuaciones diferenciales parciales. Estas máquinas generalmente se programaban en FORTRAN y lenguaje ensamblador. Los sistemas operativos típicos eran FMS (el Fortran Monitor System) e IBSYS, el sistema operativo de IBM para la 7094.
La tercera generación (1965-1980): Circuitos integrados y multiprogramación
La 360 fue la primera línea importante de computadoras en usar (a pequeña escala) circuitos integrados (IC), ofreciendo así una ventaja de precio/rendimiento considerable respecto a las máquinas de la segunda generación, que se armaban con transistores individuales. Esta línea fue un éxito inmediato, y la idea de una familia de computadoras compatibles pronto fue adoptada por todos los demás fabricantes importantes. La gran ventaja de la idea de “una familia” fue también su gran debilidad. La intención era que todo el software, incluido el sistema operativo, funcionara en todos los modelos. El software tenía que funcionar en sistemas pequeños, que en muchos casos simplemente sustituían a la 1401 para copiar tarjetas en cinta, y en sistemas muy grandes, que con frecuencia sustituían a las 7094 para realizar pronósticos del tiempo y otros trabajos de computación pesada. El software tenía que ser bueno en sistemas con pocos y con muchos periféricos; tenía que funcionar en entornos comercia- les y. científicos y, sobre todo, tenía que ser eficiente para todos estos usos distintos.

1.4 clasificacion sistemas operativos
Clasificación de los Sistemas Operativos. Con el paso del tiempo, los Sistemas Operativos fueron clasificándose de diferentes maneras, dependiendo del uso o de la aplicación que se les daba.

En general, los sistemas de multiprogramación se caracterizan por tener múltiples programas activos compitiendo por los recursos del sistema: procesador, memoria, dispositivos periféricos.
Sistema Operativo Mono tareas:
Los sistemas operativos mono tareas son más primitivos y es todo lo contrario al visto anteriormente, es decir, solo pueden manejar un proceso en cada momento o que solo puede ejecutar las tareas de una en una. Por ejemplo cuando la computadora está imprimiendo un documento, no puede iniciar otro proceso ni responder a nuevas instrucciones hasta que se termine la impresión.
Sistema Operativo Monousuario:
Los sistemas monousuarios son aquellos que nada más puede atender a un solo usuario, gracias a las limitaciones creadas por el hardware, los programas o el tipo de aplicación que se esté ejecutando. Estos tipos de sistemas son muy simples, porque todos los dispositivos de entrada, salida y control dependen de la tarea que se está utilizando, esto quiere decir, que las instrucciones que se dan, son procesadas de inmediato; ya que existe un solo usuario. Y están orientados principalmente por los microcomputadores.
Sistema Operativo Multiusuario: Es todo lo contrario a monousuario; y en esta categoría se encuentran todos los sistemas que cumplen simultáneamente las necesidades de dos o más usuarios, que comparten mismos recursos. Este tipo de sistemas se emplean especialmente en redes.
Los Sistemas Operativos por lotes:
Procesan una gran cantidad de trabajos con poca o ninguna interacción entre los usuarios y los programas en ejecución. Se reúnen todos los trabajos comunes para realizarlos al mismo tiempo, evitando la espera de dos o más trabajos como sucede en el procesamiento en serie. Estos sistemas son de los más tradicionales y antiguos, y fueron introducidos alrededor de 1956 para aumentar la capacidad de procesamiento de los programas
Sistemas Operativos de tiempo real:
Los Sistemas Operativos de tiempo real son aquellos en los cuales no tiene importancia el usuario, sino los procesos. Por lo general, están subutilizados sus recursos con la finalidad de prestar atención a los procesos en el momento que lo requieran. Se utilizan en entornos donde son procesados un gran número de sucesos o eventos. Muchos Sistemas Operativos de tiempo real son construidos para aplicaciones muy específicas como control de tráfico aéreo, bolsas de valores, control de refinerías, control de laminadores.
Sistemas Operativos de tiempo compartido:
Populares representantes de sistemas multiprogramados multiusuario, ej. : sistemas de diseño asistido por computador, procesamiento de texto , etc. Dan la ilusión de que cada usuario tiene una máquina para sí. Mayoría utilizan algoritmo de reparto circular. Programas se ejecutan con prioridad rotatoria que se incrementa con la espera y disminuye después de concedido el servicio. Evitan monopolización del sistema asignando tiempos de procesador (time slot). Gestión de memoria proporciona protección a programas residentes. Gestión de archivo debe proporcionar protección y control de acceso debido a que pueden existir múltiples usuarios acezando unos mismos archivos.
Sistemas Operativos distribuidos:
Permiten distribuir trabajos, tareas o procesos, entre un conjunto de procesadores. Puede ser que este conjunto de procesadores esté en un equipo o en diferentes, en este caso es trasparente para el usuario. Existen dos esquemas básicos de éstos. Un sistema fuertemente acoplado esa es aquel que comparte la memoria y un reloj global, cuyos tiempos de acceso son similares para todos los procesadores
Sistemas Operativos de red:
Son aquellos sistemas que mantienen a dos o más computadoras unidas a través de algún medio de comunicación (físico o no), con el objetivo primordial de poder compartir los diferentes recursos y la información del sistema. El primer Sistema Operativo de red estaba enfocado a equipos con un procesador Motorola 68000, pasando posteriormente a procesadores Intel como Novell NetWare. Los Sistemas Operativos de red más ampliamente usados son: Novell NetWare, Personal NetWare, LAN Manager, Windows NT Server, UNIX, LANtastic.
Sistemas Operativos paralelos:
En estos tipos de Sistemas Operativos se pretende que cuando existan dos o más procesos que compitan por algún recurso se puedan realizar o ejecutar al mismo tiempo. En UNIX existe también la posibilidad de ejecutar programas sin tener que atenderlos en forma interactiva, simulando paralelismo (es decir, atender de manera concurrente varios procesos de un mismo usuario). Así, en lugar de esperar a que el proceso termine de ejecutarse (como lo haría normalmente), regresa a atender al usuario inmediatamente después de haber creado el proceso. Ejemplos de estos tipos de Sistemas Operativos están: Alpha, PVM, la serie AIX, que es utilizado en los sistemas RS /6000 de IBM.

1.5 estructura: niveles o estratos de diseños

1.6 nucleo

• Núcleo: Consta de las componentes más usadas y fundamentales del sistema operativo. El núcleo administra la planificación y el cambio de contexto, la gestión de excepciones e interrupciones y la sincronización de multiprocesadores. El núcleo del sistema operativo, también llamado kernel (núcleo en alemán) es aquella parte de un sistema que interactúa de forma directa con el hardware de una máquina. Entre las funciones principales del kernel se encuentran:
· La gestión de memoria: Este nivel administra la memoria principal o memoria RAM, se encarga de asignar los bloques de memoria a los procesos y de liberarlos cuando los procesos han terminado, así también se encarga de retirar algunos procesos de la memoria y almacenar una imagen de ellos en el disco duro, con la finalidad de simular que existe más memoria de la que realmente existe de forma física, el cual es un proceso que denominamos memoria virtual. Fig29.- Administra la memoria RAM27
· La administración del sistema de archivos: Esta capa proporciona las funciones necesarias para almacenar la información en archivos, se apoya en las primitivas de la capa 2 y la decisión de que procesos hacen uso de memoria se ubican en esta capa.
· La administración de servicios de entrada/salida: Proporciona funciones primitivas para la gestión de la memoria secundaria, es decir, se encarga de proveer las primitivas necesarias para la localización, escritura y lectura de bloques de datos en el disco duro, sin llegar a proporcionar muchos detalles, cabe señalar que en esta capa la información almacenada no se representa como archivos, la cual es una implementación de una capa superior.
· La asignación de recursos entre los usuarios: En esta capa se ubica la interfaz visible para el usuario, ya sea como una línea de comando o como una GUI (Interfaz Gráfica de Usuario), con la cual el usuario comunica y que esta capa traduce al conjunto de primitivas de las capas anteriores. La manipulación del hardware se realiza por medio de controladores de dispositivo, que conocen la forma de comunicarse directamente con el hardware de la máquina. El software por su parte puede comunicarse con el kernel por medio de llamadas al sistema, las cuales le indican al kernel que realice tareas como abrir y escribir un archivo, ejecutar un programa, finalizar un proceso u obtener la fecha y hora del sistema.
unidad 2 administracion de proceso y del procesador
2.1 concepto de proceso
El concepto de proceso es fundamental en la estructura de los sistemas operativos. Este término fue acuñado por primera vez por los diseñadores de Multics en los años 60. Es un término algo más general que el de trabajo. Se han dado muchas definiciones para el término proceso, entre las que se incluyen las siguientes:
• Un programa en ejecución
• El "espíritu animado" de un programa
• La entidad que puede ser asignada al procesador y ejecutada por él.

2.2 estados y transiciones de procesos
La responsabilidad principal del sistema operativo es el control de la ejecución de los procesos; esto incluye la determinación de las pautas de intercalado que se van a seguir y la asignación de recursos a los procesos. Para poder diseñar el sistema operativo de una forma efectiva, se necesita tener un modelo claro del comportamiento de un proceso.
El modelo más sencillo que puede construirse tiene en cuenta que, en un momento dado, un proceso puede estar ejecutándose en el procesador o no. Así pues, un proceso puede estar en uno de dos estados: Ejecución o No Ejecución. Cuando el sistema operativo crea un nuevo proceso, éste entra en el sistema en estado de No Ejecución. De este modo, el proceso existe, es conocido por el sistema operativo y está esperando la oportunidad de ejecutarse. De cuando en cuando, el proceso que está ejecutando será interrumpido y el programa distribuidor del sistema operativo seleccionará un nuevo proceso para que se ejecute. El proceso anterior pasa del estado de Ejecución al estado de No Ejecución y uno de los demás procesos pasará al estado de Ejecución. Incluso en este modelo tan simple ya se comienzan a apreciar algunos de los elementos de diseño del sistema operativo. Cada proceso debe representarse de forma que el sistema operativo pueda seguirle la pista. Esto es, debe haber información relativa a cada proceso, incluyendo su estado actual y su posición en memoria. Aquellos procesos que no están ejecutándose tienen que guardarse en algún tipo de cola, para que esperen su tumo de ejecución.
Un total de nueve estados de proceso son los reconocidos por el sistema operativo UNIX; éstos están reflejados en La tabla 3.13 y un diagrama de transición de estados se muestra en La figura 3.16. Esta figura es bastante similar a la figura 3.7, con los dos estados de Dormido de UNIX correspondientes a los dos estados de Bloqueado. Las diferencias pueden resumirse rápidamente a continuación:
• UNIX emplea dos estados de Ejecución, que indican si el proceso está ejecutando en modo de usuario o en modo núcleo.
• Se hace una distinción entre los estados: Listo para Ejecutar y en Memoria, frente al estado de Expulsado. Estos dos estados son, básicamente, el mismo, como se indica por la línea de puntos que los une. Se hace la distinción para enfatizar la forma en que se pasa al estado Expulsado. Cuando un proceso esté ejecutándose en modo núcleo (como resultado de una llamada del supervisor, una interrupción de reloj, o una interrupción de E/S), llegara un momento en el que el núcleo termine su trabajo y esté listo para devolver el control al programa de usuario. En este punto, el núcleo puede decidir expulsar el proceso en curso en favor de alguno que esté listo y tenga mayor prioridad
El modelo de transición de estados que se ha desarrollado. (Las líneas discontinuas en la figura indican transiciones posibles pero no necesarias). Las nuevas e importantes transiciones son las siguientes:
• Bloqueado _ Bloqueado y suspendido: Si no hay procesos Listos, entonces al menos un proceso Bloqueado se expulsa para dar cabida a otro proceso que no esté bloqueado. Esta transición puede hacerse aun cuando hay procesos listos disponibles, cuando el sistema operativo determina que el proceso que está actualmente en Ejecución o un proceso Listo que serla conveniente expedir requiere más memoria principal para mantener un rendimiento adecuado.
• Bloqueado y suspendido _ Listo y suspendido: Un proceso en estado Bloqueado y suspendido se pasa al estado Listo y suspendido cuando ocurre el suceso que estaba esperando. Nótese que esto requiere que esté accesible para el sistema operativo la información relativa a los procesos Suspendidos.
• Listo y suspendido _ Listo: Cuando no hay procesos Listos en la memoria principal, el sistema operativo tendrá que traer uno para continuar la ejecución. Además, puede darse el caso de que un proceso en estado Listo y suspendido tenga una prioridad mayor que la de un proceso en estado Listo. En tal caso, el diseñador del sistema operativo puede decidir que es más importante tomar el proceso de mayor prioridad que minimizar el intercambio.
• Listo _ Listo y suspendido: Generalmente, el sistema operativo prefiere suspender a un proceso Bloqueado en vez de a uno Listo, ya que el proceso Listo podría ejecutarse de inmediato, mientras que el proceso Bloqueado estará ocupando espacio en la memoria principal sin poder ejecutarse. Sin embargo, puede ser necesario suspender un proceso Listo si ésta es la única forma de liberar un bloque lo suficientemente grande de memoria principal. Por último el sistema operativo puede escoger suspender un proceso Listo de más baja prioridad en lugar de uno Bloqueado que sea de prioridad más alta si él cree que el proceso Bloqueado pronto estará listo.
Estados de un Proceso en UNIX Ejecución en modo de usuario Ejecutando en modo usuario. Ejecución en modo del núcleo Ejecutando en modo del núcleo. Listo para ejecutar y en memoria Listo para ejecutar tan pronto como el núcleo lo planifique. Dormido y en memoria No dispuesto para ejecutar hasta que se produzca un suceso; el proceso está en memoria principal.
Listo para ejecutar y descargado El proceso está listo para ejecutar, pero se debe cargar el proceso en memoria principal antes de que el núcleo pueda planificarlo para su ejecución. Dormido y descargado El proceso está esperando un suceso y ha sido expulsado al almacenamiento secundario. Expulsado El proceso retorna del modo núcleo al modo usuario pero el n6cleo lo expulsa y realiza un cambio de contexto para para planificar otro proceso. Creado El proceso está recién creado y aún no está aún listo para ejecutar. Zombi El proceso ya no existe, pero deja un registro para que lo recoja el proceso padre.
2.3 procesos ligeros: hilos o hebras
En la mayoría de los sistemas operativos, estas dos características son, de hecho, la esencia de un proceso. Sin embargo, algunos argumentos pueden convencer de que estas dos características son independientes y que deben ser tratadas de manera independiente por el sistema operativo. Esto se hace así en una serie de sistemas operativos, en particular en algunos sistemas operativos de desarrollo reciente. Para distinguir estas dos características, la unidad de expedición se conoce corno hilo (thread) o proceso ligero (lightweight process), mientras que a la unidad de propiedad de los recursos se le suele llamar proceso o tarea.
Varios hilos en un solo proceso

136 Descripción y control de procesos
Mach está diseñado específicamente para trabajar en un entorno multiprocesador, aunque también se adapta bien a los sistemas monoprocesadores. En Mach, una tarea se define como la unidad de protección o unidad de asignación de recursos. A las tareas se les asocian los siguientes elementos:
• Un espacio de direcciones virtuales, que contiene la imagen de la tarea
• Acceso protegido a los procesadores, otros procesos (para la comunicación entre procesos),
Archivos y recursos de E/S (dispositivos y canales)
En una tarea puede haber uno o más hilos, cada uno con lo siguiente:
• El estado de ejecución del hilo (Ejecución, Listo, etc.)
• El contexto del procesador, que se salva cuando no está ejecutando; una forma de contemplar
Al hilo es con un contador de programa independiente operando dentro de una tarea
• Una pila de ejecución
• Almacenamiento estático para las variables locales
• Acceso a la memoria y a los recursos de la tarea, que se comparten con todos los otros
Hilos de la tarea
Los beneficios clave de los hilos se derivan de las implicaciones del rendimiento: Se tarda mucho menos tiempo en crear un nuevo hilo en un proceso existente que en crear una nueva tarea, menos tiempo para terminar un hilo y menos tiempo para cambiar entre dos hilos de un mismo proceso. Por tanto, si hay una aplicación o una función que pueda implementarse como un conjunto de unidades de ejecución relacionadas, es más eficiente hacerlo con una colección de hilos que con una colección de tareas separadas.8 Algunos estudios llevados a cabo por los desarrolladores de Mach demuestran que la aceleración en la creación de procesos, comparada con la de Las implementaciones de UNIX que no utilizan hilos, está en un factor de 10 [ITEVA87]. Un ejemplo de aplicación que podría hacer uso de hilos es un servidor, como puede ser un servidor de archivos de una red de área local. Cada vez que llegue una solicitud de un nuevo archivo, se puede generar un nuevo hilo para el programa de gestión de archivos. Puesto que el servidor debe manejar muchas solicitudes, se crearán y destruirán muchos hilos en un corto periodo de tiempo. Si el servidor es un multiprocesador, se pueden ejecutar varios hilos de una misma tarea simultáneamente y en diferentes procesadores. Los hilos son también útiles en los monoprocesadores para simplificar la estructura de los programas que lleven a cabo diversas funciones. Otros ejemplos de uso efectivo de los hilos son en las aplicaciones de proceso de comunicaciones [COOP90] y en los supervisores de transacciones. Otra forma en la que los hilos aportan eficiencia es en la comunicación entre diferentes programas en ejecución. En la mayoría de los sistemas operativos, Ia comunicación entre procesos independientes requiere la intervención del núcleo para ofrecer protección y para proporcionar los mecanismos necesarios para la comunicación. Sin embargo, puesto que los hilos de una misma tarea comparten memoria y archivos, pueden comunicarse entre sí sin invocar al núcleo. [ETW88] da cuatro ejemplos de uso de los hilos en un sistema de multitarea.

2.4 concurrencia y secuenciabilidad
 La concurrencia es el punto clave de los tres campos anteriores y fundamentales para el diseño de sistemas operativos. La concurrencia comprende un gran número de cuestiones de diseño, incluyendo la comunicación entre procesos, compartición y competencia por los recursos, sincronización de la ejecución de varios procesos y asignación del tiempo de procesador a los procesos. Se verá que estas cuestiones no solo surgen en entornos de multiprocesadores y proceso distribuido, sino incluso en sistemas multiprogramados con un solo procesador. La concurrencia puede presentarse en tres contextos diferentes:
La concurrencia es el punto clave de los tres campos anteriores y fundamentales para el diseño de sistemas operativos. La concurrencia comprende un gran número de cuestiones de diseño, incluyendo la comunicación entre procesos, compartición y competencia por los recursos, sincronización de la ejecución de varios procesos y asignación del tiempo de procesador a los procesos. Se verá que estas cuestiones no solo surgen en entornos de multiprocesadores y proceso distribuido, sino incluso en sistemas multiprogramados con un solo procesador. La concurrencia puede presentarse en tres contextos diferentes:
• Varias aplicaciones: La multiprogramación se creó para permitir que el tiempo de procesador
De la máquina fuese compartido dinámicamente entre varios trabajos o aplicaciones activas. 159 Digitalización con propósito académico Sistemas Operativos
160 Concurrencia: Exclusión mutua y sincronización
• Aplicaciones estructuradas: Como ampliación de los principios del diseño modular y la programación estructurada, algunas aplicaciones pueden implementarse eficazmente como un conjunto de procesos concurrentes.
• Estructura del sistema operativo: Las mismas ventajas de estructuración son aplicables a los programadores de sistemas y se ha comprobado que algunos sistemas operativos están implementados como un conjunto de procesos. Debido a la importancia de este tema, hay cuatro capítulos de este libro dedicados a conceptos relacionados con la concurrencia.

. Todos ellos son soluciones de software y tienen que emplear una técnica conocida como espera activa (busy-waiting). Debido a la complejidad de estas soluciones y a los inconvenientes de la espera activa, se buscarán soluciones que no necesiten esta espera, con soporte del sistema operativo o aplicado por los compiladores. Se examinarán tres métodos: semáforos, monitores y paso de mensajes.
2.5 niveles objetivos y criterios de planificacion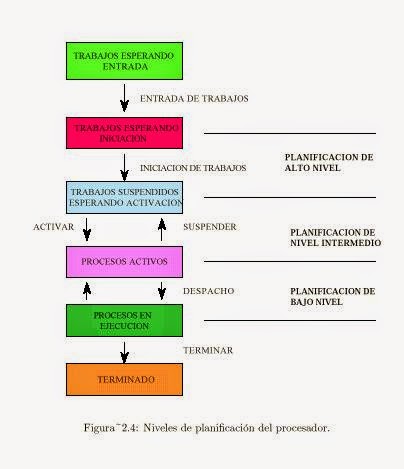 La planificacion hace referencia a un conjunto de políticas y mecanismos incorporados al sistema operativo que gobiernan el orden en que se ejecutan los trabajos que deben ser cumplimentados por el sistema informático. El objetivo principal de la planificacion es optimizar el rendimiento del sistema y proporcionar un buen servicio a todos los procesos que se encuentren en el. En general, la planificacion trata de cubrir los siguientes objetivos:
En los sistemas de multiusuario de tiempo compartido, que se combinaban con un fondo de trabajos procesados en lote, el algoritmo era mas complejo. En forma invariable, existian varios usuarios en espera de servicio y podian existir tambien otros trabajos para ser procesados en lote. Incluso en los sistemas puros de tiempo compartido existen con frecuencia los trabajos colaterales, como el sistema de correo electronico, que a menudo se ejecuta todo el tiempo para enviar o recibir correo o noticias.
Cuando mas de un proceso es ejecutable, el Sistema Operativo debe decidir cual de ellos debera ejecutarse primero. Hay que tener una planificacion de los procesos que quieren ejecutarse en el sistema.La planificacion es una funcion primordial del Sistema Operativo. La mayoria de los recursos, si no es que todos, se planifican antes de que se utilicen. La asignacion de procesadores fisicos a los procesos hace posible que estos realicen su trabajo, y tal asignacion es un problema complejo manejado por el Sistema Operativo.
Concepto de Planificacion
Objetivo de la Planificacion
Criterios de planificacion
Cuanto tiempo adicional va a necesitar el proceso para terminar?: los tiempos promedio de espera pueden reducirse priorizando los procesos que requieren de un tiempo de ejecucion minimo para su terminacion, pero pocas veces es posible conocer la cantidad de tiempo adicional que cada proceso necesita para terminar.
|

2.6 TÉCNICAS O ALGORITMOS DE PLANIFICACIÓN
En la planificación a plazo fijo, ciertos trabajos se planifican para ser terminados en un periodo específico. Estos trabajos tienen un alto valor si se entregan a tiempo y pueden carecer de valor si se entregan después del límite. La planificación a plazo fijo es compleja por muchas razones:

- Los usuarios deben proporcionar por adelantado y en forma precisa las necesidades de recursos de su trabajo. Tal información rara vez está disponible.
- El sistema debe ejecutar el programa de plazo fijo sin una severa degradación de servicio para los otros usuarios.
- El sistema debe planificar cuidadosamente las necesidades de recursos permitiendo un libre tránsito del plazo fijo. Esto puede ser difícil debido a la llegada de programas nuevos con demandas impredecibles.
- Si se activan muchos trabajos de plazo fijo, la planificación puede llegar a ser tan compleja que necesite métodos de optimización sofisticados para asegurar que el plazo fijo se cumpla.
- El manejo intenso de recursos requeridos por la planificación de plazo fijo puede generar una sobrecarga sustancial.
Los procedimientos son despachados de acuerdo al orden de llegada a la cola de listos. Una vez que un proceso tiene el CPU, se ejecuta hasta su terminación. Esta planificación es No apropiativa; es justa en el sentido formal, pero algo injusta porque los grandes procesos hacen esperar a trabajos pequeños y, los trabajos sin importancia hacen esperar a los trabajos importantes.
La Planificación FIFO ofrece una varianza en tiempo de respuesta relativamente pequeña y es, por tanto, más predecible que otros esquemas; no es un esquema útil en la planificación de procesos interactivos porque no garantiza buenos tiempos de respuesta.También se puede implementar mediante la utilización de una lista. Se reemplazan las páginas de la cabeza y se agregan al final.
Una vez que el proceso obtiene la cpu, se ejecuta hasta terminar, ya que es una disciplina “no apropiativa”.
Puede ocasionar que procesos largos hagan esperar a procesos cortos y que procesos no importantes hagan esperar a procesos importantes.
Es más predecible que otros esquemas.
No puede garantizar buenos tiempos de respuesta interactivos.
Suele utilizarse integrado a otros esquemas, por ejemplo, de la siguiente manera:
- Los procesos se despachan con algún esquema de prioridad.
- Los procesos con igual prioridad se despachan “FIFO”.
enlace a simulación fifo
La disciplina del trabajo más corto primero es NO apropiativa y en ella el trabajo o proceso con tiempo estimado de ejecución hasta terminación más corto, es el siguiente en ser ejecutado. El SJF reduce el tiempo de espera de los procesos, sin embargo, tiene una varianza mayor (es decir, es menos predecible) que en FIFO, sobre todo para los trabajos largos.
SJF favorece a los procesos cortos a costa de los procesos largos. Además, selecciona los trabajos que serán atendidos y que dejarán el sistema lo antes posible. Esto último traduce en listas de espera cortas. El SJF es NO apropiativo por lo que resulta de poca utilidad en ambientes de tiempo compartido.
- Es una disciplina no apropiativa y por lo tanto no recomendable en ambientes de tiempo compartido.
- El proceso en espera con el menor tiempo estimado de ejecución hasta su terminación es el siguiente en ejecutarse.
- Los tiempos promedio de espera son menores que con “FIFO”.
- Los tiempos de espera son menos predecibles que en “FIFO”.
- Favorece a los procesos cortos en detrimento de los largos.
- Tiende a reducir el número de procesos en espera y el número de procesos que esperan detrás de procesos largos.
- Requiere un conocimiento preciso del tiempo de ejecución de un proceso, lo que generalmente se desconoce.
- Se pueden estimar los tiempos en base a series de valores anteriores.
enlace a simulacio SJF
Un punto débil de este algoritmo se evidencia cuando una ráfaga muy corta suspende a otra un poco más larga, siendo más largo la ejecución en este orden al ser preciso un cambio adicional de proceso y la ejecución del código del planificador.
Es la contraparte apropiativa del SJF.
Es útil en sistemas de tiempo compartido.
El proceso con el tiempo estimado de ejecución menor para …nalizar es el siguiente en ser ejecutado.
Un proceso en ejecución puede ser apropiado por un nuevo proceso con un tiempo estimado de ejecución menor.
Tiene mayor sobrecarga que la planificación SJF.
Debe mantener un registro del tiempo de servicio transcurrido del proceso en ejecución, lo que aumenta la sobrecarga.
Los trabajos largos tienen un promedio y una varianza de los tiempos de espera aún mayor que en SJF.
La apropiación de un proceso a punto de terminar por otro de menor duración recién llegado podría significar un mayor tiempo de cambio de contexto (administración del procesador) que el tiempo de finalización del primero.
Al diseñarse los Sistemas Operativos se debe considerar cuidadosamente la sobrecarga de los mecanismos de administración de recursos comparándola con los beneficios esperados.
Corrige algunas de las debilidades del SJF, tales como el exceso de perjuicio hacia los procesos (trabajos) largos y el exceso de favoritismo hacia los nuevos trabajos cortos.
Es una disciplina no apropiativa.
La prioridad de cada proceso está en función no sólo del tiempo de servicio del trabajo, sino que también influye la cantidad de tiempo que el trabajo ha estado esperando ser servido.
Cuando un proceso ha obtenido la cpu, corre hasta terminar.
Las prioridades, que son dinámicas, se calculan según la siguiente fórmula, donde pr es la “prioridad”, te es el “tiempo de espera” y ts es el“tiempo de servicio”:
Es una disciplina no apropiativa.
La prioridad de cada proceso está en función no sólo del tiempo de servicio del trabajo, sino que también influye la cantidad de tiempo que el trabajo ha estado esperando ser servido.
Cuando un proceso ha obtenido la cpu, corre hasta terminar.
Las prioridades, que son dinámicas, se calculan según la siguiente fórmula, donde pr es la “prioridad”, te es el “tiempo de espera” y ts es el“tiempo de servicio”:
La SRT es apropiativa, en ella el proceso con el tiempo estimado de ejecución menor para llegar a su terminación es el siguiente en ser ejecutado, incluyendo las nuevas llegadas. En la disciplina SJF, una vez que el trabajo comienza su ejecución sigue hasta que termina. En SRT, un proceso en ejecución puede ser apropiado por un nuevo proceso con n tiempo estimado de ejecución menor.
La SRT tiene una sobrecarga mayor que la SJF. Debe mantener un registro del tiempo de servicio transcurrido del trabajo en ejecución y debe controlar las apropiaciones ocasionales.
Brinch Hansen (1971) desarrolló la estrategia el siguiente con relación de respuesta máxima (HRT), que corrige algunas de las debilidades de SJF, en especial el favoritismo por los tamaños pequeños. La HRT es una disciplina de planificación NO apropiativa en la cual la prioridad de cada trabajo está en función, no sólo del tiempo de servicio del trabajo, sino del tiempo que un proceso ha estado esperando a ser servido, Una vez que un trabajo obtiene el CPU, se ejecuta hasta su terminación. Las prioridades dinámicas en HRT se calculan según la fórmula
Los procesos son despachados en FIFO, pero, se les otorga una cantidad limitada de tiempo de CPU llamada división de tiempo (time - slice) o cuanto (quantum). Si un proceso no termina antes de que se termine su tiempo de CPU, el CPU es apropiado y asignado al siguiente proceso en espera. El proceso apropiado se coloca al final de la lista de listos.
Planeación round robin.
El esquema Round robin es efectivo en un ambiente de tiempo compartido en el cual el sistema necesita garantizar un tiempo de respuesta razonable para los usuarios interactivos. La sobre carga de la apropiación se mantiene baja mediante eficientes mecanismos de cambio de contexto y proporcionado suficiente memoria para que los procesos residan en ella al mismo tiempo.
Existe una variante de este esquema llamada selfish round robin (SRR). En este esquema los procesos que entran al sistema se colocan primero en una lista de espera hasta que su prioridad alcanza el nivel de proceso para la lista de activos. Mientras un proceso está en la lista de espera, su prioridad aumenta en una relación a; cuando un proceso entra a la lista de activos su prioridad se incrementa en una relación b.
Tamaño del cuanto.
La determinación del tamaño del cuanto es decisiva para la operación efectiva de un sistema computacional. ¿Debe ser pequeño o grande el cuanto? ¿Debe ser fijo o variable? ¿Debe ser el mismo para todos los usuarios, o debe ser diferente para cada grupo de usuarios?.
Cuando se tiene un cuanto grande cada proceso pude recibir todo el tiempo que necesita para su terminación, de manera que el esquema round robin se convierte en un FIFO. Cuando el cuanto es pequeño, la sobrecarga por el intercambio de contexto se convierte en un factor dominante y el rendimiento del sistema se degrada.
No hay comentarios:
Publicar un comentario